Постът обяснява проста схема на контролера на нивото на водата, приложима за автоматично превключване на две потопяеми водни помпи последователно в отговор на предварително зададено превключване на нивото на водата. Цялата верига е изградена с помощта само на една интегрална схема и няколко други пасивни части. Идеята е поискана от един от заинтересованите членове на този блог.
Технически спецификации
Можете ли да ми помогнете с този проблем: В сутерен картер има две потопяеми помпи с поплавъчни превключватели (P1 и P2), инсталирани за постигане на някакво ниво на излишък.
За да използваме еднакво двете помпи, искаме да редуваме P1 и P2, когато се достигне предварително зададено ниво на водата. Тоест, при първото достигане на предварително зададеното ниво P1 трябва да започне и да изпомпва водата. Следващият път, когато достигне предварително зададеното ниво, P2 трябва да започне и да изпомпва водата.
При следващия повод ще дойде ред на P1 и т.н. Това, от което се нуждаем, е „редуващо се“ управление на релето, работещо P1 и P2, завой по завой.
Дизайнът
Показаната схема на автоматичен потопяем контролер на помпата може да се разбере, както е дадено под:
Както се вижда, цялата схема е изградена около четири NAND порти от един IC 4093 .
Портовете N1 - N3 образуват стандартна верига на флип флоп, при която изходът на N2 се превключва от висок към нисък и обратно в отговор на всеки положителен спусък на кръстовището на C5 / R6.
N4 е позициониран като буфер, чийто вход е прекратен като сензорен вход за откриване на наличие на вода над предварително определено фиксирано ниво вътре в резервоара.
Връзката от земята или минуса на веригата също е разположена във водата на резервоара близо и успоредно на горния сензорен вход на N4.
Първоначално ако приемем, че няма вода в резервоара, поддържа входа на N4 висок през R8, което води до ниска мощност на кръстовището на C5 / R6.
Това превръща N1, N2, N3 и цялата конфигурация в неподходяща позиция в режим на готовност, което води до T1, T2 е в изключено положение.
Това задържа съответните релета REL1 / 2 в деактивирано положение с контактите им на нива N / C.
Тук контактите REL2 се уверяват, че захранващото напрежение остава отсечено по време на липсата на вода в резервоара.
Сега да предположим, че водата в резервоара започва да се покачва и мости земята с вход N4, което я прави ниска, това предизвиква висок сигнал на изхода на N4.
Това високо на изхода на N4 активира T2, REL2 и също така обръща изхода на N2, така че REL1 също се активира. Сега REL2 позволява мрежовото напрежение да достигне двигателите.
А с активиран REL1 също задейства помпата P2 чрез нейните N / O контакти.
Веднага след като нивото на водата потъне под предварително зададената точка, връща ситуацията на входа на N4, създавайки ниско a изход.
Този нисък сигнал от N4 обаче не оказва ефект върху REL1, тъй като N1, N2, N3 задържат REL1 в активирана позиция.
REL2, който е пряко зависим от изхода на N4, изключва изключването на захранването към двигателите и изключването на P2.
По време на следващия цикъл, когато нивото на водата достигне чувствителните точки, изходът N4 превключва REL2, както обикновено, позволявайки захранването да достигне до двигателите, и също превключва REL1, но този път към е N / C контакт.
Това незабавно включва P1 в действие, защото P1 е конфигуриран с N / C на REL1, като по този начин почива P2 и задейства P1 по този повод.
Горното алтернативно преобръщане на P1 / P2 продължава да се повтаря с текущите цикли съгласно горните операции.
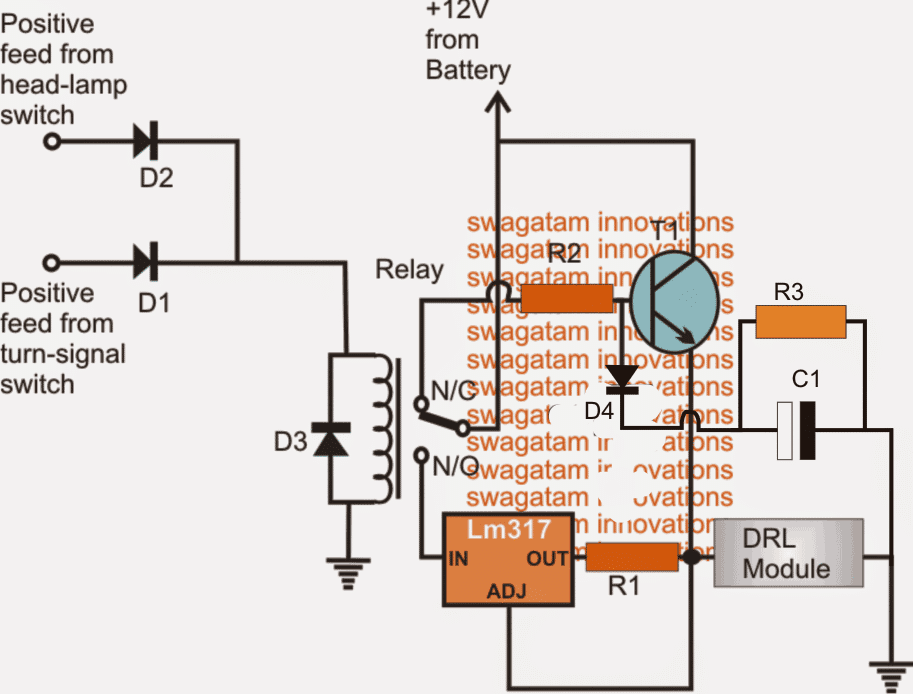
Електрическа схема

Списък на частите за горната схема на автоматичен контролер на потопяема помпа:
- R3, R9 = 10K,
- R4, R5, R8 = 2M2,
- R6, R7 = 39K,
- R4, R5 = 0,22, DISC,
- C6 = 100µF / 25V,
- D4, D5 = 1N4148,
- С4, С5, С7 = 0.22uF
- T1, T2 = BC 547,
- N1 --- N4 = IC4093,
- Релета = 12V, SPDT, 20 ампера контактни релета dides = 1N4007
Предишна: Как да каскадирам IC 4033 в многоцифрен брояч Напред: 1 до 10 минути Таймерна верига