В съвременния свят, робот ще играе важна роля . Основната цел на робота е да намали човешката сила. Роботите се използват в електрониката в много приложения. В тази статия обсъдихме как да изградим робот с модула Arduino и микроконтролера 8051. За да изградим робот с Arduino, ние обясняваме за робота arduino с избягване на препятствия. Необходимите компоненти включват корпус на робот, мотор с постоянен ток, ултразвуков сензор, модул Arduino, интегрална схема на драйвера на двигателя и модул Arduino
Как да изградим робот?
The необходими компоненти за изграждане на робота включва следното
Тяло на робота
Основното тяло на робота на роботът за избягване на препятствия е показано на следващото изображение. Корпусът на робота е пластмасов корпус и съдържа колела от двете страни. Пред корпуса на робота е разположен ултразвуковият сензор. Чрез използването на ултразвуков сензор препятствието може да открие. Когато роботът се движи, ако някакво препятствие бъде открито от ултразвуковия сензор, тогава роботът ще се отдалечи и той ще продължи да се движи.

Тяло на робота
DC мотор
The DC мотор е електрически мотор и работи на електричество с постоянен ток. Работата на всеки електрически мотор се основава на електромагнетизма. Магнитното поле се генерира от токопроводящия проводник, когато е поставен във външно магнитно поле, то ще изпитва сила, пропорционална на тока в проводника. Като цяло знаем, че магнитите са с противоположно привличане на полярността от север на юг и ако полярностите са същите като север на север и юг на юг, тогава магнитите ще се отблъснат.

DC мотор
Вътрешната конфигурация на постояннотоковия двигател е проектирана да прикрепи магнитното взаимодействие между токопроводящия проводник и външното магнитно поле, за да предизвика движение. В това ние използваме два постояннотокови мотора, всеки двигател съдържа 6v, а общите два DC мотора съдържат 12v. Двата постояннотокови мотора са поставени в корпуса на робота, което можем да наблюдаваме на следващото изображение. Тялото на робота се премества с помощта на постояннотокови двигатели

Роботно тяло с DC мотор
Модул Arduino
Следващото изображение показва изображението на модула arduino. The модул arduino играе важна роля в дизайна на робота за избягване на препятствия с помощта на комплект arduino. Приемният щифт на arduino е свързан с втория щифт на ултразвуковия сензор, а 1-ви, 2-ри и 3-ти щифт на модула arduino е свързан към драйвера на DC двигателя. Общите компоненти кондензатор и диод също са свързани към модула arduino с помощта на захранването на батерията.

Модул Arduino
IC драйвер на двигателя
За да стартирате DC мотора ИС на моторния драйвер използвани. Пиновете 3,6 и 11, 14 на драйвера на двигателя са свързани към постояннотоковия двигател. Входните щифтове 1 и 2 са свързани към модула arduino, а щифтът за активиране е свързан към щифта на предавателя на arduino. Щифтовете 4, 5, 12, 13 на водача на двигателя са свързани към земята.

IC драйвер на двигателя
Ултразвуков сензор
В тази концепция ултразвуковият сензор се използва за откриване на препятствие отпред и ще изпрати командата към дъската на arduino. В зависимост от входния сигнал микроконтролерът пренасочва робота да се движи в алтернативни посоки.

Ултразвуков сензор
Приложенията за избягване на препятствия от робота arduino
- Роботът arduino може да се движи на всяка повърхност
- Той може да се движи по метална повърхност като тялото на хладилника.
Изображението по-долу показва робота arduino за избягване на препятствия

Робот Arduino за избягване на препятствия
За изграждане на робот с микроконтролера 8051 ние обясняваме за превозното средство-робот на металотърсача. Компонентите, необходими за изграждането на робота с микроконтролера 8051, са
- 8051 микроконтролер
- DC двигатели
- Моторни шофьори
- Металдетектор
- Декодер
- Енкодер
- Бутони
- Кристал
- RF предавател и приемник
Металдетектор
The металдетектор е намотка, която има една или повече метални намотки, използвани за откриване на металите на земята. Металотърсачът работи на принципа на електромагнитната индукция. Металотърсачът е свързан с корпуса на робота чрез печатната платка, което можем да наблюдаваме на последното изображение. Следващото изображение показва общия металотърсач, използван в електронните проекти.

Металдетектор
Бутони
Бутоните са бутони, които са изградени от твърди метали като пластмаса и метал. Обикновено бутоните се използват за нулиране на програмата в микроконтролера. Следващото изображение показва изображението с бутон.

Натисни бутона
8051 Микроконтролер
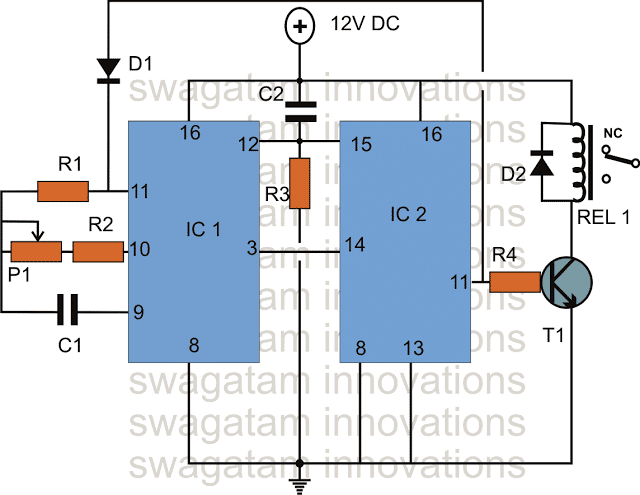
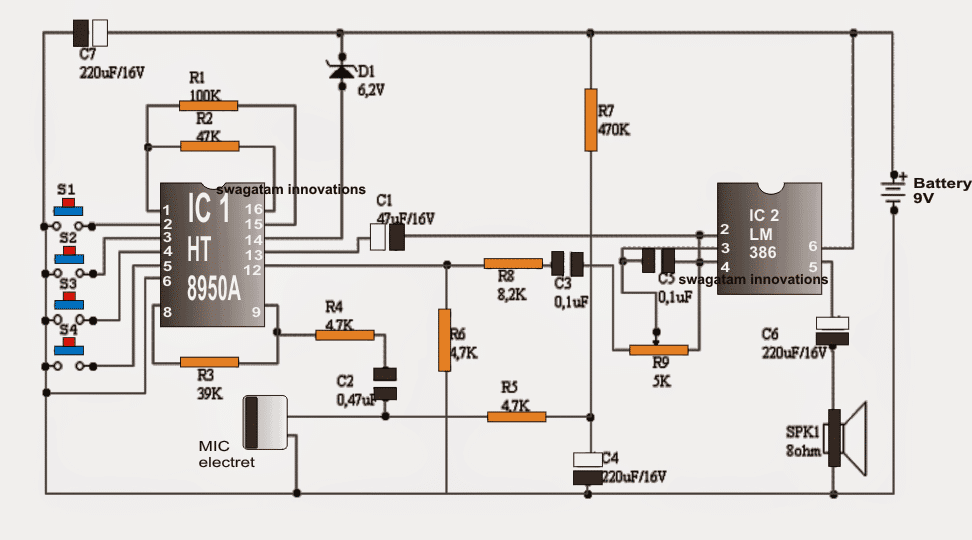
The Микроконтролерът 8051 се състои от 40 пина . Четвъртият и петият щифт на микроконтролера е свързан с кристалния осцилатор. Vcc щифтът се подава към захранването на 5V и заземяващият щифт е свързан към земята. Щифтовете 15, 16, 18, 19 на микроконтролера са свързани към IC кодера на HT12E. Пиновете 2, 7, 8, 9 на микроконтролера са свързани към бутоните.
Следващото изображение след свързване на всички компоненти като резистор, кондензатор, кристален осцилатор, микроконтролер от серия 8051, енкодери и т.н. са включени печатната платка .

PCB връзки
Изображението по-долу показва робота за металдетектор с микроконтролер от серия 8051.

Робот за металдетектор с микроконтролер от серия 8051
В тази статия обсъдихме Как да изградим робот с arduino и 8051 микроконтролер . Надявам се, четейки тази статия, сте придобили някои основни познания за изграждане на робот. Ако имате някакви въпроси относно тази статия или относно електрониката и комуникационни проекти , моля не се колебайте да коментирате в раздела по-долу. Ето въпроса към вас, Какво е микроконтролер от серия 8051?
.